








Verso la guida autonoma: l’Intelligenza Artificiale e il riconoscimento delle immagini
I futuri sviluppi dell’intelligenza Artificiale (AI) permetteranno ai veicoli autonomi di identificare e reagire di fronte alle innumerevoli situazioni che si presentano durante un viaggio. Già oggi i sistemi ADAS sono capaci di riconoscere gli elementi nelle immagini con notevoli benefici alla sicurezza di tutti.

Quante volte per poter effettuare il login alla vostra casella email vi è capitato di dover riconoscere i semafori presenti nell’immagine proposta dall’algoritmo reCAPTCHA per dimostrare di non essere un robot? E se oltre a dimostrare di non essere un robot stessimo aiutando un algoritmo di intelligenza artificiale ad apprendere come riconoscere le immagini?
Questo è uno dei tanti modi con cui già oggi abbiano a che fare con l’intelligenza artificiale nella vita quotidiana.
Negli ultimi anni lo sviluppo dei sistemi di assistenza alla guida (ADAS – Advanced Driver Assistance System) ha subito una forte accelerazione e il numero di sensori presenti sulle nostre automobili è notevolmente aumentato.
Questo trend è destinato a crescere ulteriormente considerando la rapida ascesa dei veicoli a guida autonoma che richiederanno sempre più sensori per poter percepire l’ambiente attorno a sé.
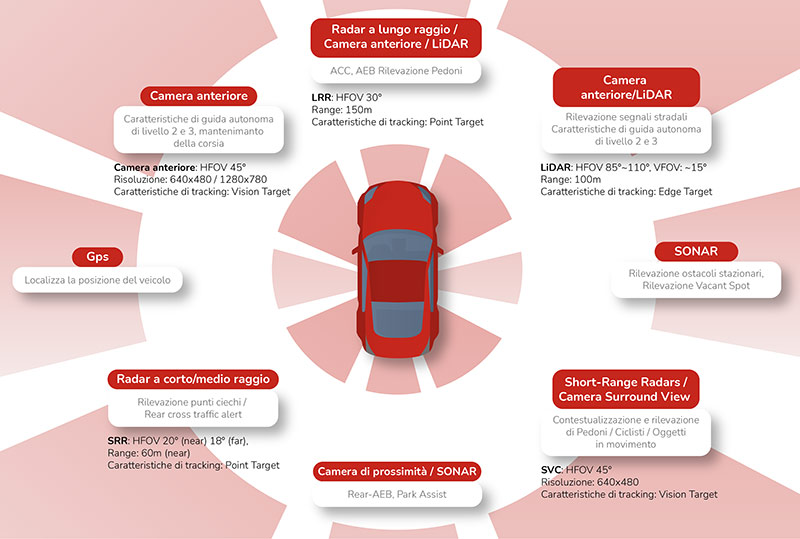
Tecnologie e sensori a bordo dei veicoli, presenti e futuri





Nel prossimo futuro vedremo una crescita dei sistemi di intelligenza artificiale nella vita quotidiana a bordo dei nostri mezzi di trasporto, a questi sensori infatti si aggiungerà la comunicazione tra veicoli (V2V) e con le infrastrutture (V2I) per poter pianificare in maniera più adeguata le manovre dei veicoli a guida autonoma.
Generali jeniot è impegnata da anni nella ricerca e sperimentazione sui sistemi di assistenza alla guida e ha sviluppato in collaborazione con Quattroruote un protocollo di test per verificare la reale efficacia nella riduzione dei sinistri, come potete leggere in questo articolo, sistemi ADAS: la collaborazione tra Generali jeniot e Quattroruote.
Ma come funzionano questi sistemi?
Si possono distinguere 3 fasi principali:
- per il sistema di mantenimento della carreggiata viene confrontata la nostra posizione e velocità laterale rispetto al limite della corsia;
- per la frenata di emergenza la velocità relativa e la distanza con il veicolo che ci precede;

Tutte queste fasi sono cruciali per il corretto funzionamento del sistema, ma mentre le fasi di pianificazione ed esecuzione della manovra hanno input e output deterministici e facilmente verificabili, la fase di identificazione della situazione circostante al veicolo risulta essere la più complessa a causa dell’enorme variabilità delle situazioni possibili.
Il centro di ricerca
Fa parte di Generali jeniot, il Centro di Innovazione e Sperimentazione, con sede a Pero (MI), che si occupa di presidiare la frontiera dell’innovazione tecnologica e di servizio attraverso iniziative di ricerca e sviluppo, l’impatto dell’intelligenza artificiale nella vita quotidiana di mezzi e guidatori, prototipazione, collaborazione con aziende, istituti di ricerca, università e start up. In ambito automotive, nel Centro di Innovazione e Sperimentazione vengono realizzati crash test a bassa velocità, prove sperimentali sul funzionamento dei dispositivi telematici e dei veicoli connessi, valutazioni sugli ADAS, progetti di ricerca sulle nuove tecnologie, studi delle tecniche riparative, analisi di mercato e corsi di formazione.


